Forståelse af LPC84x Startup Power Issues og den komplette Power-Up Sequence
LPC84x mikrocontrollere er meget udbredt i indlejrede systemer, fordi de kombinerer processorkraft, hukommelse og periferiudstyr i en kompakt enhed.For at sikre pålidelig drift skal du forstå, hvordan mikrocontrolleren starter op, og hvordan strømforhold påvirker dens adfærd.Denne artikel forklarer nøglefunktionerne og arkitekturen for LPC84x mikrocontrollere sammen med deres strømforsyningskrav, nulstillingsmekanismer og opstartssekvens.Den diskuterer også almindelige startstrømproblemer og praktiske måder, du kan fejlfinde dem på.Katalog

Figur 1. LPC84x mikrocontroller
Oversigt over LPC84x Startup Power Issues
LPC84x mikrocontrollere er meget udbredt i indlejrede systemer, fordi de kombinerer behandlingskapacitet, hukommelse og periferiudstyr i en kompakt og energieffektiv enhed.Pålidelig drift afhænger dog i høj grad af en stabil og velkontrolleret opstartsproces.Under opstart kan problemer såsom ustabil forsyningsspænding, forkert spændingsrampehastighed eller inkonsistente nulstillingsbetingelser påvirke, hvordan mikrocontrolleren initialiseres.Disse forhold kan forhindre enheden i at nå normal drift eller forsinke systemstart.
Funktioner af LPC84x mikrocontrollere
1. ARM Cortex-M0+ Core
LPC84x-serien er bygget op omkring ARM Cortex-M0+ processoren, som er optimeret til lavt strømforbrug og effektiv ydeevne.Denne 32-bit kerne understøtter hurtig afbrydelseshåndtering og deterministisk udførelse, hvilket gør den velegnet til indlejrede applikationer.Dens enkle arkitektur gør det muligt at bygge kompakt firmware og samtidig bevare pålidelige behandlingsegenskaber.Kernen understøtter også standard ARM-udviklingsværktøjer til lettere programmering og fejlfinding.
2. Indbygget Flash-hukommelse
Disse mikrocontrollere inkluderer on-chip flash-hukommelse, der bruges til at gemme programkode og firmware.Den interne flash giver typisk tilstrækkelig plads til indlejrede applikationer uden at kræve eksterne hukommelsesenheder.Integreret flash giver hurtigere adgang til instruktioner og forbedrer den samlede systemeffektivitet.Det forenkler også hardwaredesign, fordi mikrocontrolleren kan fungere uafhængigt efter programmering.
3. SRAM-hukommelse
LPC84x-familien integrerer intern SRAM til runtime-datalagring og stakoperationer.Denne hukommelse giver hurtig adgang til variabler, buffere og midlertidige behandlingsdata.Hurtig SRAM forbedrer udførelseshastigheden, fordi CPU'en kan få adgang til data uden at vente på ekstern hukommelse.Det understøtter også multitasking-operationer i indlejrede applikationer.
4. Fleksible seriel kommunikationsgrænseflader
Flere kommunikationsudstyr er tilgængelige til tilslutning af eksterne enheder og moduler.Disse omfatter UART-grænseflader til seriel kommunikation, SPI-grænseflader til højhastigheds perifer kommunikation og I²C-grænseflader til sensor- og kontrolnetværk.Disse indbyggede kommunikationsblokke forenkler hardwareintegration i indlejrede designs.Den kan bruges til at forbinde skærme, sensorer, hukommelsesenheder og andre digitale komponenter.
5. Analog perifer support
LPC84x-mikrocontrollerne inkluderer integrerede analoge funktioner såsom en 12-bit Analog-to-Digital Converter (ADC).Dette gør det muligt for enheden at måle analoge signaler fra sensorer eller eksterne kredsløb.Nogle varianter inkluderer også Digital-to-Analog Converter (DAC) funktionalitet til generering af analoge udgange.Disse egenskaber gør det muligt for mikrocontrolleren at interface direkte med signaler.
6. Fleksibel I/O-konfiguration
General-purpose input/output (GPIO) ben gør det muligt for mikrocontrolleren at interagere med eksterne hardwarekomponenter.LPC84x inkluderer fleksible pin-konfigurationsfunktioner, der gør det muligt at tildele flere funktioner til en enkelt pin.Denne fleksibilitet hjælper med at optimere PCB-layouts og maksimere tilgængelige perifere enheder.GPIO-ben kan konfigureres til digital input, output eller alternative perifere funktioner.
7. Lavenergidriftstilstande
Laveffekttilstande er inkluderet for at reducere energiforbruget i batteridrevne applikationer.Disse tilstande gør det muligt for mikrocontrolleren at deaktivere ubrugte perifere enheder eller reducere systemets clockfrekvens i inaktive perioder.Strømstyringsfunktioner hjælper med at forlænge batterilevetiden i bærbare enheder.Systemet kan hurtigt vende tilbage til aktiv drift efter behov.
8. Integreret timer og kontrolmoduler
Forskellige timermoduler er integreret for at understøtte tidsmåling, signalgenerering og hændelseskontrol.Disse inkluderer multi-rate timere, tilstandskonfigurerbare timere og watchdog-timere.Timere muliggør præcis timingkontrol i indlejrede systemer såsom motorstyring, kommunikationstiming eller periodisk opgaveplanlægning.Disse moduler forbedrer systemets pålidelighed og ydeevne.
LPC84x blokdiagram oversigt
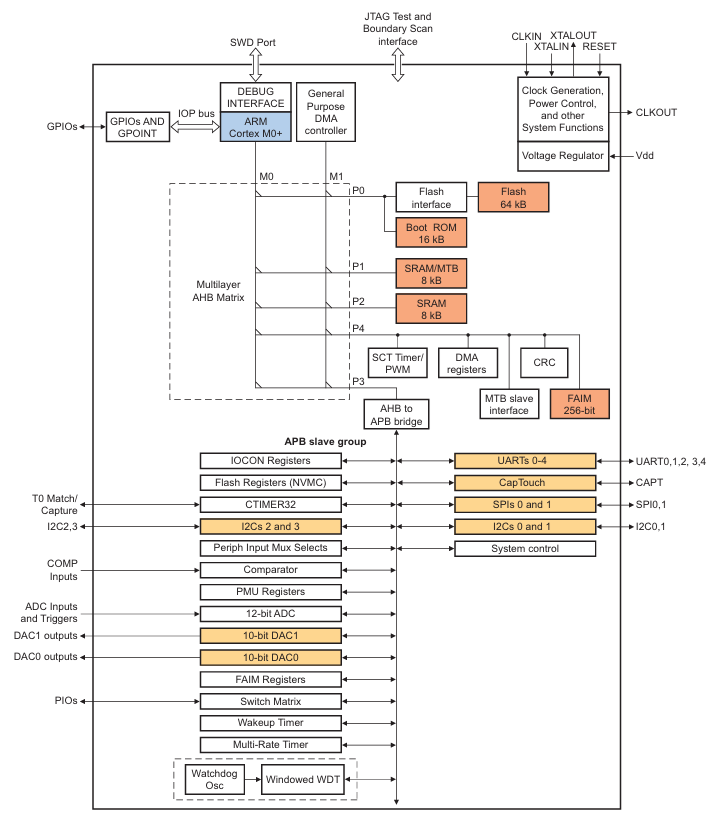
Figur 2. LPC84x mikrocontrollerblokdiagram
LPC84x-arkitekturen integrerer flere funktionelle blokke, der arbejder sammen for at udføre indlejrede behandlingsopgaver.I midten af systemet er ARM Cortex-M0+ CPU, som udfører programinstruktioner gemt i intern flashhukommelse, mens den tilgår data fra SRAM.En flerlags AHB-busmatrix forbinder processoren med hukommelsesmoduler og perifere grænseflader, hvilket muliggør effektiv kommunikation mellem interne komponenter.Urgenerering og strømstyring blokerer kontrolsystemets timing og sikrer stabil enhedsdrift på tværs af forskellige ydeevnetilstande.Debug-grænseflader såsom SWD gør det muligt at programmere og teste firmware under udvikling.Forskellige perifere enheder, herunder timere, kommunikationsmoduler og analoge grænseflader, er forbundet gennem det interne bussystem for at give ekstern enhedsinteraktion.Tilsammen danner disse blokke en kompakt mikrocontroller-arkitektur designet til effektiv indlejret kontrol.
Krav til LPC84x strømforsyning
|
Parameter |
Symbol |
Typisk / rækkevidde |
|
Forsyningsspænding |
VDD |
1,8 V – 3,6 V |
|
Analog forsyningsspænding |
VDDA |
1,8 V – 3,6 V |
|
Driftsspænding (typisk) |
VDD |
3,3 V |
|
Tændspændingstærskel |
VPOR |
~1,5 V (typisk) |
|
Brun-ud spændingsniveau |
VBOR |
Konfigurerbar (~1,7-2,7 V) |
|
Aktiv tilstand Aktuel |
IDD |
Enhedsafhængig |
|
Dyb-søvnstrøm |
IDD(DS) |
Meget lavt (µA-område) |
|
Maksimal GPIO-spænding |
VIO |
Op til VDD |
|
Driftstemperaturområde |
TA |
−40°C til +105°C |
|
Anbefalet afkoblingskondensator |
— |
0,1 µF nær hver VDD-ben |
LPC84x Nulstil kilder og opstartsadfærd
Power-On Reset (POR)
Power-On Reset (POR) er en intern nulstillingsmekanisme, der aktiveres automatisk, når der først tilsluttes strøm til LPC84x-mikrocontrolleren.Dens hovedformål er at holde systemet i en nulstillingstilstand, indtil forsyningsspændingen når et sikkert driftsniveau.Når enheden tændes, overvåger POR-kredsløbet forsyningsspændingen og forhindrer CPU'en i at udføre instruktioner for tidligt.Når spændingen bliver stabil, frigives nulstillingstilstanden, og processoren begynder at udføre kode fra intern flashhukommelse.Dette sikrer, at mikrocontrolleren altid starter i en forudsigelig tilstand, efter at der er tilsluttet strøm.I den interne arkitektur interagerer nulstillingssystemet med ur- og strømstyringsblokkene, før normal drift begynder.Denne mekanisme danner grundlaget for LPC84x-startprocessen.
Brown-Out Reset (BOR)
Brown-Out Reset (BOR) er en beskyttelsesmekanisme, der nulstiller LPC84x-mikrocontrolleren, når forsyningsspændingen falder under en sikker driftstærskel.Dens formål er at forhindre CPU'en i at fungere under ustabile spændingsforhold, der kan forårsage uforudsigelig adfærd.Når spændingen falder under det konfigurerede niveau, udløser BOR-kredsløbet en systemnulstilling for at beskytte hukommelse og perifere tilstande.Efter at forsyningsspændingen vender tilbage til et stabilt niveau, genstarter enheden normalt.Denne funktion hjælper med at opretholde pålidelig drift i systemer, hvor strømudsving kan forekomme.I den interne arkitektur arbejder spændingsovervågningskredsløb sammen med strømstyringsblokken for at detektere lavspændingsforhold.Som et resultat kan mikrocontrolleren komme sig sikkert fra midlertidige spændingsfald.
Ekstern nulstillingsstift (NULSTIL)
Den eksterne RESET-pin giver en hardwaremetode til nulstilling af LPC84x-mikrocontrolleren uden for chippen.Det tillader eksterne enheder eller kontrolsignaler at tvinge mikrocontrolleren til en nulstillingstilstand, når det er nødvendigt.Når RESET-signalet bliver aktivt, stopper processoren med at udføre instruktioner og vender tilbage til den oprindelige opstartstilstand.Dette sikrer, at systemet kan genstarte rent under visse operationelle hændelser.Efter nulstillingssignalet er frigivet, udfører enheden sin interne initialiseringsproces, før den kører firmware igen.Ekstern nulstillingskontrol bruges ofte under programmering, fejlfinding eller systemovervågning.Inden for den interne systemstruktur forbinder denne nulstillingssti direkte til den centrale nulstillingscontroller.
Nulstil vagthund
En watchdog-nulstilling sker, når watchdog-timeren registrerer, at systemsoftwaren ikke længere fungerer korrekt.Watchdog-timeren overvåger løbende programafviklingen ved at kræve periodiske opdateringer fra den kørende firmware.Hvis softwaren ikke kan opdatere timeren inden for den forventede periode, udløber timeren og udløser en systemnulstilling.Denne mekanisme beskytter systemet mod softwarenedbrud, uendelige sløjfer eller uventede firmwarefejl.Efter nulstillingen er sket, genstarter mikrocontrolleren og begynder at køre programmet igen.I den interne arkitektur fungerer watchdog-timeren sammen med systemkontrollogik og timere.Dens formål er at forbedre den overordnede systempålidelighed og opretholde kontinuerlig drift i indlejrede systemer.
LPC84x Power-Up Sequence
1. Strømforsyningsstabilisering
Når spænding først påføres enheden, kræver de interne kredsløb en kort periode for forsyningsspændingen at stabilisere sig.I løbet af denne fase etablerer de interne regulatorer og strømstyringsblokke korrekte spændingsniveauer for CPU'en og periferiudstyr.Mikrocontrolleren forbliver inaktiv, mens denne stabilisering finder sted.Dette forhindrer upålidelig adfærd under den tidlige opstartsfase.Stabil spænding sikrer, at interne logiske kredsløb kan fungere korrekt.
2. Aktivering af nulstilling ved start
Når forsyningen begynder at stabilisere sig, holder Power-On Reset-kredsløbet processoren i en nulstillingstilstand.Denne nulstilling forhindrer CPU'en i at udføre instruktioner, indtil spændingen når et sikkert niveau.Reset-controlleren overvåger forsyningsspændingen kontinuerligt i denne fase.Først når spændingen overstiger den krævede tærskel, begynder nulstillingen at udløses.Dette garanterer, at mikrocontrolleren starter med en ren systemtilstand.
3. Initialisering af internt ur
Når nulstillingsbetingelserne er ryddet, initialiserer mikrocontrolleren sit interne ursystem.Urgeneratoren starter den interne oscillator, som giver timing til CPU og perifere operationer.Dette ur bliver den vigtigste timingreference for systemudførelse.Processoren kan ikke køre instruktioner uden en stabil urkilde.Derfor er urinitialisering et vigtigt trin i systemstart.
4. Hukommelsesinitialisering
I det næste trin forbereder processoren interne hukommelsesstrukturer, der bruges af programmet.Flash-hukommelse giver firmware-instruktionerne, mens SRAM gemmer runtime-data.Systemet forbereder også vektortabellen, der bruges til afbrydelseshåndtering.Denne hukommelsesopsætning gør det muligt for processoren at lokalisere programmets indgangspunkt korrekt.Korrekt hukommelsesinitialisering sikrer en jævn firmwareudførelse.
5. Perifer initialisering
Efter hukommelsesforberedelse aktiverer systemet vigtige interne ydre enheder.Disse perifere enheder kan omfatte timere, kommunikationsmoduler og kontrolregistre, der kræves af firmwaren.Nogle eksterne enheder forbliver deaktiverede, indtil applikationssoftwaren aktiverer dem.Initialiseringsfasen sikrer, at det grundlæggende systemmiljø er klar.Dette trin forbereder enheden til applikationsudførelse.
6. Firmwarekørsel begynder
Når alle interne initialiseringstrin er gennemført, begynder processoren at udføre firmwaren, der er gemt i flashhukommelsen.Udførelsen starter typisk fra nulstillingsvektoren defineret i programkoden.Fra dette tidspunkt styrer den indlejrede applikation systemdriften.Firmwaren konfigurerer ydre enheder, behandler inputsignaler og udfører systemopgaver.Dette markerer overgangen fra hardwarestart til programkørsel.
Almindelige LPC84x-startstrømproblemer
• Langsom spændingsrampe under opstart
Hvis forsyningsspændingen stiger for langsomt, kan de interne nulstillingskredsløb opføre sig uforudsigeligt.En langsom rampehastighed kan forsinke korrekt frigivelse af nulstilling og påvirke enhedens initialisering.I nogle systemer kan CPU'en forsøge at starte, før spændingen er helt stabil.Dette kan resultere i inkonsekvent opstartsadfærd.
• Strømforsyningsstøj eller ustabilitet
Elektrisk støj på strømforsyningsledningen kan forstyrre stabil opstart af mikrocontroller.Støj kan forårsage midlertidige spændingsfald, der udløser utilsigtede nulstillinger.Disse udsving kan påvirke interne ur og logiske kredsløb.Som følge heraf kan mikrocontrolleren genstarte gentagne gange.
• Utilstrækkelige afkoblingskondensatorer
Dårlig afkobling nær mikrocontrollerens strømben kan forårsage ustabil spænding under opstart.Hurtige strømændringer inde i chippen kræver nærliggende kondensatorer for at stabilisere forsyningen.Uden korrekt afkobling kan der forekomme spændingsspidser.Denne ustabilitet kan påvirke systeminitialisering.
• Spændingsfald under opstart
Hvis strømforsyningen ikke kan levere tilstrækkelig strøm ved opstart, kan spændingen falde kortvarigt.Denne situation kan udløse brown-out nulstillingsbetingelser.Sådanne fald kan forekomme, når andre komponenter i systemet starter samtidigt.Disse midlertidige dips kan afbryde opstartsprocessen.
•Nulstil signalustabilitet
Eksterne nulstillingssignaler, der svinger under opstart, kan forårsage gentagne nulstillinger.Hvis nulstillingssignalet ikke forbliver stabilt, vil mikrocontrolleren muligvis aldrig fuldføre sin initialisering.Dette kan forhindre firmware i at køre normalt.Stabile nulstillingsbetingelser er nødvendige for pålidelig opstart.
• Ukorrekt urkildetilgængelighed
Hvis systemet er afhængigt af en ekstern urkilde, der ikke starter korrekt, kan CPU'en muligvis ikke køre korrekt.Uden et stabilt clocksignal kan instruktionsudførelsen ikke begynde.Dette kan resultere i, at systemet ikke reagerer.Urets stabilitet er vigtig for normal opstart af mikrocontroller.
Fejlfinding af LPC84x opstartsproblemer
• Bekræft forsyningsspændingsstabiliteten
Det første fejlfindingstrin er at måle mikrocontrollerens forsyningsspænding ved hjælp af et oscilloskop eller multimeter.Spændingen skal forblive inden for det anbefalede driftsområde under opstart.Eventuelle pludselige fald eller spidser kan indikere ustabilitet i strømforsyningen.Observation af spændingsbølgeformen under opstart kan afsløre skjulte problemer.Stabil spænding er vigtig for pålidelig initialisering af mikrocontroller.
• Tjek Nulstil signaltiming
Nulstillingssignalet skal forblive stabilt og korrekt synkroniseret med opstartsprocessen.Mange overvåger ofte nulstillingsstiften for at bekræfte, at den opfører sig som forventet under opstart.Et ustabilt eller støjende nulstillingssignal kan genstarte systemet gentagne gange.Bekræftelse af nulstillingstiming sikrer, at initialisering først sker, efter at strømmen bliver stabil.Korrekt nulstillingsadfærd understøtter korrekt systemstart.
• Efterse strømforsyningens filtrering
Strømfiltreringskomponenter såsom afkoblingskondensatorer bør undersøges omhyggeligt.Disse kondensatorer hjælper med at opretholde en stabil spænding under hurtige strømændringer.Dårlig placering eller utilstrækkelig kapacitans kan tillade, at spændingsstøj påvirker mikrocontrolleren.At sikre korrekt filtrering forbedrer opstartssikkerheden.Hardwareinspektion kan ofte afsløre manglende eller forkert placerede kondensatorer.
• Bekræft urkildedrift
Systemuret skal starte korrekt, for at processoren kan udføre instruktioner.Kontroller oscillatorsignaler for at bekræfte korrekt funktion.Hvis urkilden ikke starter, kan CPU'en ikke køre firmware.Overvågning af ursignalet hjælper med at bestemme, om tidskredsløb fungerer korrekt.Pålidelig urdrift er påkrævet for normal opstart.
• Undersøg firmwareinitialiseringskoden
Startkode inde i firmwaren kan påvirke systemets initialiseringsadfærd.Gennemgå rutinerne for nulstillingshåndtering og systeminitialisering.Forkert konfiguration af systemregistre eller periferiudstyr kan forsinke normal drift.Bekræftelse af startkoden sikrer, at firmware initialiserer hardware korrekt.Softwareinspektion supplerer hardwarefejlfinding.
• Observer opstartsadfærd med fejlretningsværktøjer
Debug-grænseflader såsom SWD gør det muligt at overvåge processoraktivitet under opstart.Brug fejlfindingsværktøjer til at kontrollere, om CPU'en når programmets hovedindgangspunkt.Knækpunkter og fejlfindingslogfiler hjælper med at afsløre, hvor initialiseringen stopper.Denne metode giver værdifuld indsigt i systemets adfærd under tidlige opstartsfaser.
Konklusion
Pålidelig opstart af en LPC84x mikrocontroller afhænger af stabil effekt, korrekt nulstillingsadfærd og et korrekt fungerende ursystem.Vigtige opstartstrin omfatter strømstabilisering, nulstillingsfrigivelse, uropsætning, hukommelsesforberedelse og firmwarekørsel.Problemer som spændingsfald, støj, dårlig afkobling eller ustabile nulstillingssignaler kan afbryde denne proces.Omhyggeligt strømdesign og systematisk fejlfinding er med til at sikre ensartet opstart og stabil systemdrift.
Om os
ALLELCO LIMITED
Læs mere
Hurtig forespørgsel
Send en forespørgsel, vi svarer med det samme.
Ofte stillede spørgsmål [FAQ]
1. Hvad bruges LPC84x-mikrocontrolleren til?
LPC84x mikrocontroller er almindeligt anvendt i indlejrede systemer, der kræver lavt strømforbrug og kompakt hardware.Typiske applikationer omfatter industrielle kontrolsystemer, sensorgrænseflader, forbrugerelektronik og IoT-enheder.
2. Hvilke udviklingsværktøjer kan bruges til at programmere LPC84x mikrocontrollere?
Du kan programmere LPC84x-enheder ved hjælp af ARM-kompatible værktøjer såsom Keil MDK, MCUXpresso IDE eller IAR Embedded Workbench.Disse miljøer understøtter debugging, kompilering og firmwareudvikling.
3. Kræver LPC84x-mikrocontrolleren en ekstern krystaloscillator?
Nej, LPC84x inkluderer en intern oscillator, der kan generere systemuret.Nogle applikationer kan dog bruge en ekstern krystal for højere timing nøjagtighed.
4. Hvad er den maksimale clockhastighed for LPC84x mikrocontrollere?
De fleste LPC84x-enheder fungerer ved clockhastigheder på op til omkring 30 MHz.Denne hastighed muliggør effektiv behandling og samtidig opretholde et lavt strømforbrug.
5. Kan LPC84x mikrocontrollere bruges i batteridrevne enheder?
Ja, LPC84x-enheder er designet med flere laveffekttilstande, der reducerer energiforbruget i inaktive perioder.Dette gør dem velegnede til bærbar elektronik, IoT-noder og batteridrevne indlejrede systemer.

Hvad er et H7-batteri?Størrelse, funktioner og brug af køretøjer
på 2026-03-10

Forstå DVI-stik: Alt hvad du behøver at vide
på 2026-03-09
Populære indlæg
-

Kompleks instruktionssæt computere: Hvordan de ændrede computing?
på 8000-04-18 147760
-

USB-C pinout og funktioner
på 2000-04-18 111967
-
Brug af Xilinx Unified Simulering Primitiver: En omfattende guide til FPGA -design og simulering
på 1600-04-18 111351
-
Strømforsyningsspændinger i elektronik: Betydning af VCC, VDD, VEE, VSS og GND
på 0400-04-18 83729
-

RJ45 Connector Guide: Pinout, ledninger, kabeltyper og anvendelser
på 1970-01-01 79516
-
Den ultimative guide til trådfarvekoder i moderne elektriske systemer
Den måde, vores elektriske systemer bruger farver på, er ikke kun til udseende.Hver trådfarve angiver nu en bestemt funktion, hvilket gør det lettere at identificere og håndtere elektriske komponen...på 1970-01-01 66930
-

Purge Valve Guide: Funktion, symptomer, test og udskiftning for optimal motorydelse
Purge -ventilen er en vigtig del af en bils system, der hjælper med at holde luften ren ved at håndtere brændstofdampe, før de kan flygte ud i atmosfæren.Dette hjælper ikke kun miljøet ved at reduc...på 1970-01-01 63078
-
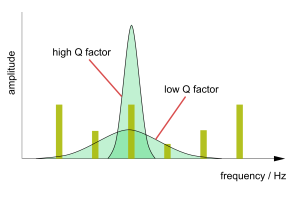
Kvalitet (q) Faktor: Ligninger og applikationer
Kvalitetsfaktoren eller 'Q' er vigtig, når man kontrollerer, hvor godt induktorer og resonatorer fungerer i elektroniske systemer, der bruger radiofrekvenser (RF).'Q' måler, hvor godt et kredsløb m...på 1970-01-01 63023
-

Opnå spidsydelse med den maksimale effektoverførselsteorem
Den maksimale effektoverførselssætning forklarer, hvordan energi fra en kilde, såsom et batteri eller generator, flyder til en tilsluttet belastning.Det viser den nøjagtige betingelse, hvor belastn...på 1970-01-01 54088
-
A23 batterispecifikationer og kompatibilitet
A23-batteriet er et lille, cylinderformet batteri med høj spænding.Også kaldet 23A, 23AE eller MN21 kører den på 12 volt og meget højere end AA- eller AAA -batterier.Dets specielle design ...på 1970-01-01 52160
Hot delnummer
-

IS25LQ025B-JNLE
ISSI, Integrated Silicon Solution Inc
IC FLASH 256KBIT SPI/QUAD 8SOIC
AD9764ARZ
Analog Devices Inc.
IC DAC 14BIT A-OUT 28SOIC
VI-711384B
Vicor Corporation
T 50/140/ 80 24V/ 3.1A
XRT83SL314IB
MaxLinear, Inc.
IC TELECOM INTERFACE 304TBGA
C152C
Powerex Inc.
SCR 300V 70A TO83
MC68882CRC25A
Freescale Semiconductor
MATH COPROCESSOR, 32-BIT
EPF81500ARC304-2
Intel
IC FPGA 208 I/O 304RQFP
FDC6332L
Fairchild Semiconductor
BUFFER/INVERTER PERIPHL DRIVER
74AHC1G125DBVRG4
Texas Instruments
IC BUF NON-INVERT 5.5V SOT23-5
ZXTN25040DZTA
Diodes Incorporated
TRANS NPN 40V 5A SOT89-3
LT1399CS#PBF
Analog Devices Inc.
IC OPAMP CFA 3 CIRCUIT 16SO
LT1963ES8-1.8#TRPBF
Analog Devices Inc.
IC REG LINEAR 1.8V 1.5A 8SOIC
EMK325BJ226KM-T
Taiyo Yuden
CAP CER 22UF 16V X5R 1210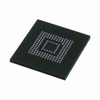
THGAF8G9T43BAIR
Kioxia America, Inc.
IC FLASH 64GBIT UFS 153VFBGA
NVMFS5C410NWFAFT1G
onsemi
MOSFET N-CH 40V 46A/300A 5DFN
GRM188R61E225KA12D
Murata Electronics
CAP CER 2.2UF 25V X5R 0603
LTC488ISW#PBF
Analog Devices Inc.
IC RECEIVER 0/4 16SOIC
400BXW68MEFR18X20
Rubycon
CAP ALUM 68UF 20% 400V RADIAL -

IRF3805STRL-7PP
Infineon Technologies
MOSFET N-CH 55V 160A D2PAK
MAX365CSE+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST-NOX4 85OHM 16SOIC
B82789C0513H002
EPCOS - TDK Electronics
CMC 51UH 250MA 2LN SMD AEC-Q200
AT24C128BY6-YH-T
Microchip Technology
IC EEPROM 128KBIT I2C 8MINI MAP
1.5SMC33A
Good-Ark Semiconductor
TVS, UNI-DIR, 1500W, 33V, DO-214
TPS2014P
Texas Instruments
IC PWR SWITCH N-CHANNEL 1:1 8DIP
AIAC-1812-39NJ-T
Abracon LLC
FIXED IND 39NH 2.8A 5.6 MOHM SMD
C3225Y5V1C226Z/1.30
TDK Corporation
CAP CER 22UF 16V Y5V 1210
MAX15012AASA+
Analog Devices Inc./Maxim Integrated
IC GATE DRVR HALF-BRIDGE 8SOIC
S25FL512SDSMFBG10
Infineon Technologies
IC FLASH 512MBIT SPI/QUAD 16SOIC
RCLAMP1851Y.TFT
Semtech Corporation
TVS DIODE 18VWM 12V SLP0603P2X3E
A3280LLHLT-T
Allegro MicroSystems
MAGNETIC SWITCH LATCH SOT23W
LMF100CIWMX
Texas Instruments
IC FILTER 100KHZ SWITCH 20SOIC
AT49BV1614-11TI
Microchip Technology
IC FLASH 16MBIT PARALLEL 48TSOP
C1608X6S1A685K080AC
TDK Corporation
CAP CER 6.8UF 10V X6S 0603
DIT4096IPWR
Texas Instruments
IC LINE DRIVER 28TSSOP
74404041470
Würth Elektronik
FIXED IND 47UH 560MA 987MOHM SMD
GRM0335C1E680JD01D
Murata Electronics
CAP CER 68PF 25V C0G/NP0 0201 -

1N2130A
Solid State Inc.
DIODE GEN PURP 150V 70A DO5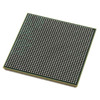
P5021NXN7TMC
NXP USA Inc.
IC SOC 64BIT 2X1.8GHZ 1295FCBGA
SG3543N
Microchip Technology
IC POWER SUPPLY SUPERVISOR 16DIP
AD633ANZ
Analog Devices Inc.
IC ANALOG MULTIPLIER 8-DIP
BLM15PX221SN1D
Murata Electronics
FERRITE BEAD 220 OHM 0402 1LN
RC4558DGKR
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8VSSOP
MPC8308CVMAFD
Freescale Semiconductor
MPU, 32-BIT, 266MHZ, PBGA473
SN75374N
Texas Instruments
IC GATE DRVR LOW-SIDE 16DIP
BQ20Z90DBTR
Texas Instruments
IC GAS GAUGE FOR BQ29330 30TSSOP
RP101K332D-TR
Nisshinbo Micro Devices Inc.
IC REG LIN 3.3V 300MA DFN1612-4B
HD64F3687HV
Renesas Electronics America Inc
IC MCU 16BIT 56KB FLASH 64QFP
2225SA332JAT1A\SB
KYOCERA AVX
CAP CER 3300PF 1.5KV NP0 2225
ST8034TDT
STMicroelectronics
IC INTERFACE SPECIALIZED 16SO
SRU1048-150Y
Bourns Inc.
FIXED IND 15UH 3.2A 29 MOHM SMD
MIC5213-3.6YC5-TR
Microchip Technology
IC REG LINEAR 3.6V 80MA SC70-5
MC34932EK
NXP USA Inc.
IC BRIDGE DRIVER PAR 54SOIC
TVP5146M2PFP
Texas Instruments
IC DIGITL VIDEO DECODER 80-HTQFP
BZX79C11
onsemi
DIODE ZENER 11V 500MW DO35