Introduktion til kontrolsystemer: arbejde, typer og applikationer
Du bruger kontrolsystemer, når en maskine automatisk holder en værdi stabil, såsom temperatur, hastighed eller niveau.Denne artikel forklarer, hvad et kontrolsystem er, hvordan dets dele arbejder sammen, og hvordan feedback holder output korrekt.Du vil også se hovedtyperne af systemer, og hvordan de opfører sig i drift.Almindelige anvendelser, fordele og grænser er inkluderet.Katalog
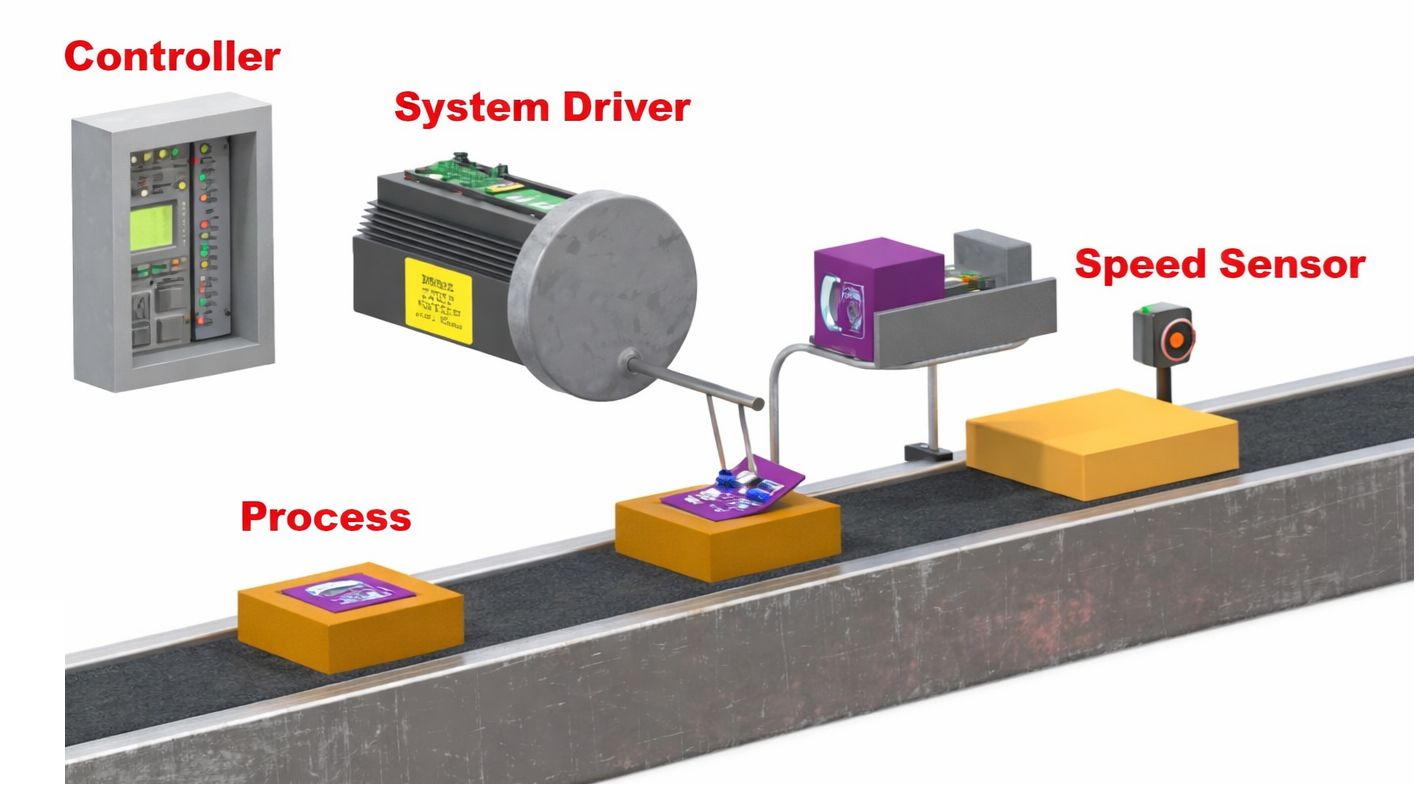
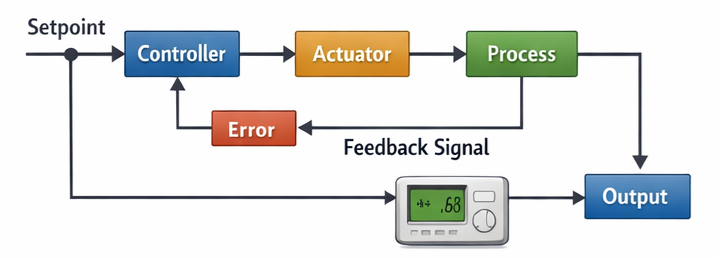
Figur 1. Eksempel på styresystem
Hvad er et kontrolsystem?
Et kontrolsystem er et system, der holder en målt værdi tæt på en ønsket målværdi.Dens formål er automatisk at justere en proces, så outputtet forbliver korrekt, selv når forholdene ændrer sig.For eksempel holder en rumtermostat temperaturen tæt på det indstillede niveau, og en fartpilot holder køretøjet ved en valgt hastighed.En vandbeholderniveauregulator holder også vandhøjden ved et valgt mærke.Enkelt sagt kontrollerer og korrigerer et kontrolsystem løbende en variabel, så den matcher den nødvendige værdi.
Grundlæggende elementer i et kontrolsystem
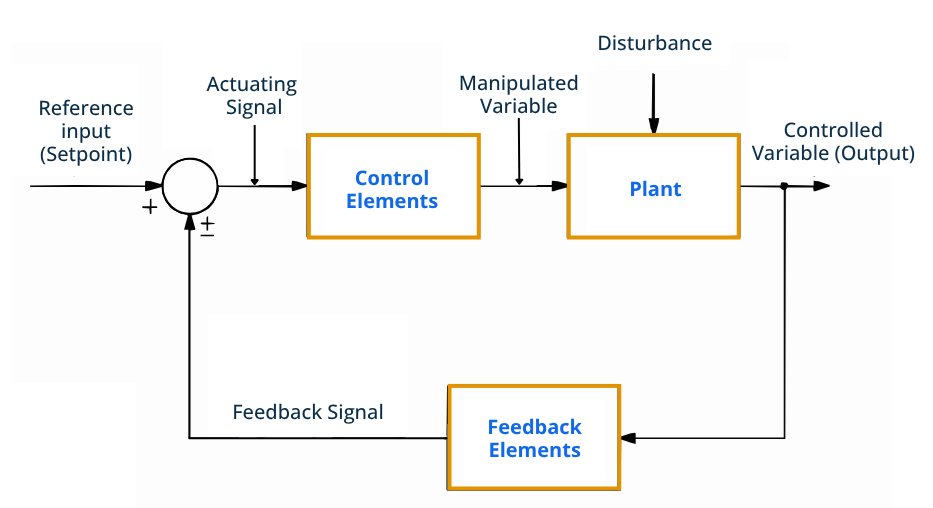
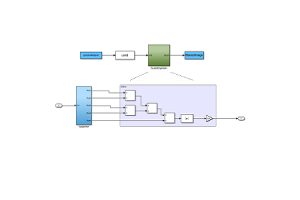
Figur 2. Kontrolsystemblokdiagram
Et kontrolsystem er lavet af flere standarddele, der hver udfører en bestemt opgave.
• Referenceinput (setpunkt)
Dette er den ønskede værdi, systemet forsøger at opretholde.Det repræsenterer den valgte måltilstand.Systemet sammenligner altid den faktiske værdi med denne reference.
• Aktiveringssignal
Dette er signalet, der produceres efter sammenligning af de ønskede og faktiske værdier.Det repræsenterer, hvor meget justering der er nødvendig.Signalet forbereder systemet til korrektion.
• Kontrolelementer
Disse dele håndterer beslutningsprocessen.De bestemmer den korrigerende handling baseret på det modtagne signal.Outputtet fra denne fase forbereder processen til justering.
• Manipuleret variabel
Dette er den justerbare mængde, der sendes til processen.Ændring af denne værdi påvirker det endelige output.Det er den variabel systemet direkte kan variere.
• Plante
Anlægget er den proces, der styres.Den producerer den endelige outputværdi.Systemet sigter mod at holde dette output på det ønskede niveau.
• Forstyrrelse
Dette er en uønsket ændring, der påvirker processen.Det kan skubbe output væk fra den ønskede værdi.Det skal systemet kompensere for.
• Styret variabel (output)
Dette er det faktiske målte resultat af processen.Det viser systemets nuværende tilstand.Målet er at holde det lig med referenceinputtet.
• Feedbackelementer
Disse måler output og sender information tilbage til kontrol.De giver systemet den aktuelle tilstand.Dette gør det muligt at bestemme korrektionen.
• Feedbacksignal
Dette er den returnerede information om outputværdien.Det repræsenterer processens tilstand.Systemet bruger det til sammenligning.
Arbejdsprincip for kontrolsystemet
Figur 3. Kontrolsystemets arbejdsprincip
Arbejdsprincippet for et styresystem begynder med, at en ønsket inputværdi gives til systemet.Systemet sammenligner derefter denne værdi med den faktiske outputværdi.Forskellen mellem dem kaldes fejlsignalet.Hvis fejlen eksisterer, genererer systemet et korrektionssignal.Denne korrektion justerer processen for at reducere fejlen.Udgangen ændres og kontrolleres igen løbende.Cyklussen gentages, indtil outputtet svarer nøje til den ønskede værdi.
Karakteristika for kontrolsystemer
Kontrolsystemer vurderes ud fra, hvor godt de fungerer under drift.Disse karakteristika beskriver kvaliteten og pålideligheden af systemets respons.
|
Karakteristika |
Beskrivelse |
|
Stabilitet |
Output gør
ikke divergere;vender tilbage til konstant værdi efter forstyrrelse |
|
Nøjagtighed |
Endelig fejl ≤
±2–5 % af indstillet værdi |
|
Præcision |
Output
variation ≤ ±1 % under samme input |
|
Svartid
|
Indledende
reaktion sker inden for målt forsinkelsestid (td) |
|
Opgangstid |
Tid fra 10 %
til 90 % af den endelige værdi |
|
Afregningstid |
Går ind og
forbliver inden for ±2 % båndet |
|
Overskydning |
Peak overstiger
slutværdi med % beløb |
|
Steady-State
Fejl |
Konstant
forskydning tilbage efter stabilisering |
|
Følsomhed |
ΔOutput /
ΔParameterændringsforhold |
|
Robusthed |
Vedligeholder
drift trods forstyrrelsesændring |
|
Båndbredde |
Fungerer
effektivt op til -3 dB afskæringsfrekvens |
|
Gentagelighed |
Samme input
producerer samme output inden for tolerance |
|
Pålidelighed |
Fungerer
uden fejl for nominel driftstid (MTBF) |
|
Dæmpning |
Oscillation
henfald bestemt af dæmpningsforhold ζ |
|
Hastighed af
Svar |
Samlet tid til
nå en stabil tilstand |
Typer af kontrolsystemer
Kontrolsystemer er klassificeret ud fra, hvordan de håndterer information, signaler og reaktionsadfærd.De er grupperet efter feedbackbrug, signalform og matematisk adfærd.
Open-loop kontrolsystem
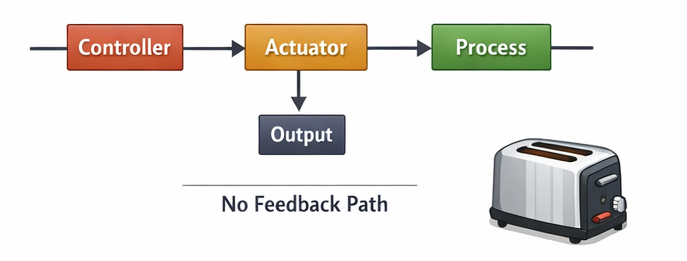
Figur 4. Diagram for åbent sløjfe-kontrolsystem
Et åbent sløjfe-kontrolsystem er et system, hvor outputtet ikke påvirker kontrolhandlingen.Systemet sender en kommando og antager, at resultatet er korrekt uden at kontrollere det.Fordi der ikke er nogen feedback-sti, kan den ikke automatisk rette fejl eller forstyrrelser.Ydeevnen afhænger hovedsageligt af korrekt kalibrering og driftsforhold.Disse systemer er enkle, billige og nemme at designe.Ændringer i belastning eller miljø kan dog påvirke det endelige resultat.Almindelige eksempler inkluderer en elektrisk brødristertimer, vaskemaskine timerstyring og fast vandingstimer.
Closed-loop kontrolsystem
Figur 5. Diagram for lukket sløjfe-kontrolsystem
Et lukket sløjfe-kontrolsystem er et system, der bruger feedback til at justere sit output automatisk.Systemet måler resultatet og sammenligner det med den ønskede værdi.Hvis der vises en forskel, anvendes en korrektion for at reducere fejlen.Denne kontinuerlige justering muliggør nøjagtig og stabil drift, selv når forholdene varierer.Closed-loop-systemer giver bedre præcision og pålidelighed end open-loop-systemer.De er meget udbredt i moderne automatiske kontrolapplikationer.Typiske eksempler omfatter klimaanlægstemperaturkontrol, fartpilot og automatiske spændingsregulatorer.
Kontinuerligt tidskontrolsystem
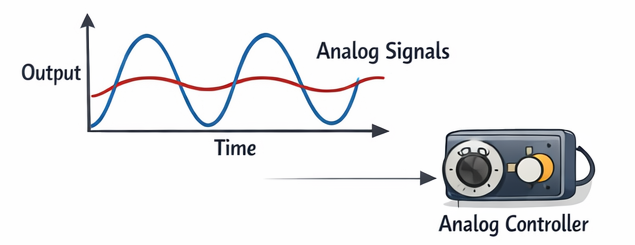
Figur 6. Kontinuerlig-tid (analog) kontrolsignal
Et kontinuerligt tidsstyringssystem behandler signaler, der ændrer sig jævnt over tid.Input og output eksisterer på hvert øjeblik uden afbrydelse.Disse systemer arbejder normalt med analoge elektriske eller mekaniske signaler.Fordi signalerne er kontinuerlige, er responsen også jævn og naturlig.Kontinuerlige tidssystemer findes almindeligvis i traditionelle analoge controllere.De er velegnede til fysiske processer, der kræver øjeblikkelig reaktion.Eksempler omfatter analoge hastighedsregulatorer, lydforstærkervolumenkontrol og hydraulisk ventilpositionskontrol.
Tidsdiskret kontrolsystem
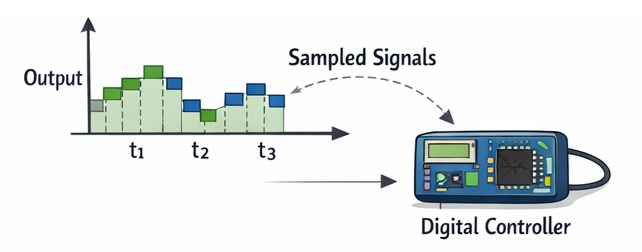
Figur 7. Diskret-tids (digitalt) styresignal
Et tidsdiskret kontrolsystem fungerer ved hjælp af samplede datasignaler.Systemet kontrollerer og opdaterer kun værdier med bestemte tidsintervaller.Disse signaler behandles normalt af digitale controllere eller mikroprocessorer.Outputtet ændres trin for trin i stedet for kontinuerligt.Sådanne systemer tillader programmerbar drift og fleksibel justering.De er meget udbredt i moderne elektronisk og computerbaseret kontrol.Eksempler omfatter mikrocontroller-baseret temperaturkontrol, digital motorhastighedskontrol og smart home-termostater.
Lineært kontrolsystem
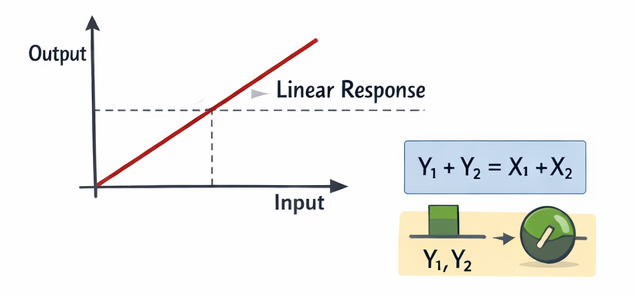
Figur 8. Lineært system input-output forhold
Et lineært styresystem følger et proportionalt forhold mellem input og output.Hvis input fordobles, fordobles output også under de samme betingelser.Disse systemer opfylder superpositionsprincippet, hvor kombinerede input producerer kombinerede output.Lineær adfærd tillader forudsigelig og nem matematisk analyse.De fleste teoretiske kontroldesigns forudsætter lineær drift for enkelhedens skyld.Lineære modeller hjælper med at designe stabile og nøjagtige systemer.Eksempler omfatter elektroniske forstærkere med lille signal og motorstyringsområder med lav belastning.
Ikke-lineært kontrolsystem
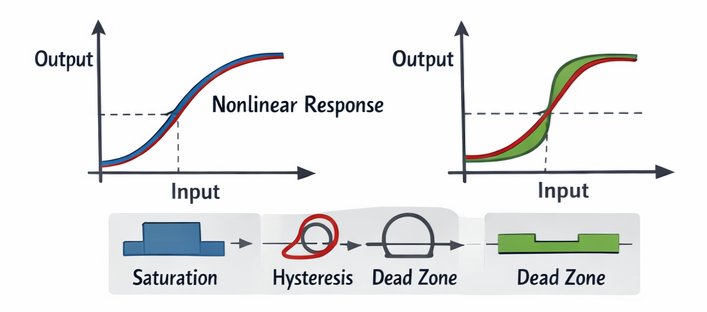
Figur 9. Ikke-lineære systemresponskarakteristika
Et ikke-lineært styresystem har et output, der ikke er proportionalt med inputtet.Reaktionen ændres afhængigt af driftsområde eller forhold.Små inputændringer kan give store outputvariationer eller slet ingen ændring.Effekter som mætning, hysterese og døde zoner forekommer ofte.Disse systemer er sværere at analysere, men repræsenterer fysiske processer mere præcist.Mange systemer opfører sig naturligt på en ikke-lineær måde.Eksempler omfatter robotarmbevægelsesgrænser, magnetisk aktuatoradfærd og ventilflowkontrol ved ekstreme positioner.
Fordele og ulemper ved styresystemer
Kontrolsystemer forbedrer konsistensen og reducerer manuel indsats, men introducerer også kompleksitet og omkostninger.
Fordele ved kontrolsystemer
• Systemet holder output tæt på den ønskede værdi under drift.
• Operatører behøver ikke at blive ved med at justere udstyret i hånden.
• Maskiner kan køre i lange timer uden hyppige stop.
• Systemet korrigerer automatisk ændringer i forhold.
• Driftsstatus kan kontrolleres fra et panel eller fjerndisplay.
Ulemper ved kontrolsystemer
• Opsætningsomkostningerne er højere end simple manuelle systemer.
• Der er brug for faglærte arbejdere til opsætning og service.
• Sensorer og elektroniske dele kan svigte over tid.
• Det kan tage længere tid at finde årsagen til problemerne.
• Systemet afhænger af stabil elektrisk effekt.
Anvendelser af kontrolsystemer
Styresystemer bruges i både industriel automation og hverdagsudstyr for automatisk at opretholde korrekt drift.
1. Industriel fremstilling
Produktionsmaskiner opretholder ensartede produktdimensioner og kvalitet.Automatiserede samlebånd bruger regulering for at sikre repeterbarhed.Dette reducerer spild og forbedrer effektiviteten.
2. Temperaturregulering
Opvarmnings- og køleudstyr opretholder behagelige miljøforhold.Bygninger er afhængige af automatisk justering for at stabilisere indeklimaet.Dette forbedrer energieffektiviteten og komforten.
3. Transportsystemer
Køretøjer bruger hastigheds- og stabilitetskontrol for mere jævn drift.Moderne biler inkluderer fartpilot og træksystemer.Disse forbedrer køresikkerheden og ydeevnen.
4. Strømsystemer
Elektriske netværk regulerer spændings- og frekvensniveauer.Generatorer justerer output for at matche belastningsbehovet.Dette sikrer en stabil elforsyning.
5. Robotik og automatisering
Robotter udfører nøjagtige positionerings- og bevægelsesopgaver.Automatiserede maskiner arbejder kontinuerligt med høj præcision.Dette muliggør avanceret fremstilling.
6. Medicinsk udstyr
Enheder opretholder kontrollerede driftsforhold under behandlingen.Overvågningsudstyr holder værdier inden for sikre grænser.Dette forbedrer patientsikkerheden og pålideligheden.
7. Hvidevarer
Daglige enheder administrerer automatisk driftsindstillinger.Vaskemaskiner og køleskabe opretholder korrekte driftsforhold.Dette forenkler daglige opgaver.
8. Luftfartssystemer
Fly og droner opretholder stabile flyveforhold.Automatisk vejledning holder korrekt orientering og højde.Dette understøtter pålidelig navigation.
Kontrolsystem vs automatisering vs indlejrede systemer
Disse teknologier er tæt beslægtede, men tjener forskellige tekniske formål inden for moderne elektroniske og industrielle produkter.
|
Feature |
Kontrol
System |
Automatisering |
Indlejret
System |
|
Hovedfokus |
Regulering af
variabler |
Proces
henrettelse |
Enhed
operation |
|
Formål |
Vedligehold
ønskede værdi |
Udfør opgaver
automatisk |
Kør dedikeret
funktioner |
|
Omfang |
Specifik
procesadfærd |
Hele
arbejdsgang
|
Single
produkt enhed |
|
Beslutning
Evne |
Baseret på
målte værdier |
Baseret på
programmeret logik |
Baseret på
firmware |
|
Brug af feedback |
Ofte
påkrævet |
Valgfrit |
Valgfrit |
|
Hardware type |
Sensorer og
aktuatorer |
Maskiner og
controllere |
Mikrocontroller
bord |
|
Software rolle |
Beregning
og rettelse |
Sekvensering
og koordinering |
Enhed
kontrollogik |
|
Svartype |
Kontinuerlig
justering |
Opgave
henrettelse |
Funktionel betjening |
|
Systemstørrelse |
Lille til
medium |
Medium til
store |
Meget lille |
|
Fleksibilitet |
Moderat |
Høj |
Begrænset |
|
Tid
Krav |
Høj |
Moderat |
Høj |
|
Ansøgning
Niveau |
Proces niveau |
Planteniveau |
Produktniveau |
|
Eksempel |
Temperatur
kontrol |
Fabrik
produktionslinje |
Smart ur |
|
Integration |
En del af
automatisering |
Indeholder
kontrolsystemer |
Understøtter begge dele |
Konklusion
Styresystemer opretholder stabiliteten ved løbende at sammenligne det faktiske output med en målværdi og rette eventuelle fejl.Deres ydeevne afhænger af kerneelementer som feedback, controllerhandling og den kontrollerede proces.Forskellige klassifikationer definerer, hvordan signaler håndteres, og hvor præcist et system reagerer på forstyrrelser.På grund af disse muligheder anvendes kontrolsystemer i vid udstrækning i industri, transport, energi, medicinsk udstyr og dagligdags udstyr.
Om os
ALLELCO LIMITED
Læs mere
Hurtig forespørgsel
Send en forespørgsel, vi svarer med det samme.
Ofte stillede spørgsmål [FAQ]
1. Hvad er forskellen mellem en controller og et kontrolsystem?
En controller er kun den beslutningsgivende enhed (som en PLC eller PID controller).Et kontrolsystem omfatter controlleren plus sensorer, aktuatorer og processen, der reguleres.
2. Hvad er PID-kontrol, og hvorfor er det vigtigt?
PID-styring bruger proportionelle, integrale og afledte handlinger for at minimere fejl hurtigt og problemfrit.Det forbedrer stabilitet, nøjagtighed og responshastighed i de fleste industrielle systemer.
3. Hvorfor svinger eller jager kontrolsystemer nogle gange?
Oscillation opstår, når korrektioner er for aggressive eller forsinkede.Dårlig tuning, langsomme sensorer eller overdreven forstærkning får output til at overskride gentagne gange.
4. Hvad er aktuatormætning?
Aktuatormætning sker, når aktuatoren når sin fysiske grænse og ikke kan øge output yderligere.Dette forhindrer systemet i at rette store fejl.
5. Hvordan håndterer kontrolsystemer forsinkelser i processer?
De bruger tuningmetoder, filtre eller forudsigelige algoritmer til at kompensere for forsinkelse, så korrektionen sker på det rigtige tidspunkt.

Vejledning til 4,7 kΩ modstand: Farvekode, anvendelser, test og værdisammenligning
på 2026-02-16
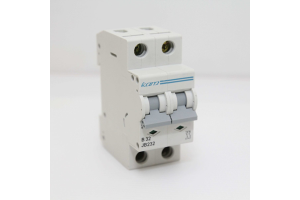
Miniature Circuit Breaker (MCB): Arbejdsprincip, typer, klassificeringer og valgvejledning
på 2026-02-15
Populære indlæg
-

Kompleks instruktionssæt computere: Hvordan de ændrede computing?
på 8000-04-18 147771
-

USB-C pinout og funktioner
på 2000-04-18 112007
-
Brug af Xilinx Unified Simulering Primitiver: En omfattende guide til FPGA -design og simulering
på 1600-04-18 111351
-
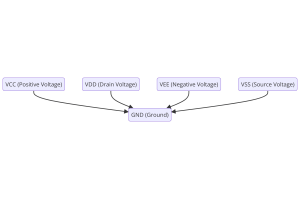
Strømforsyningsspændinger i elektronik: Betydning af VCC, VDD, VEE, VSS og GND
på 0400-04-18 83768
-

RJ45 Connector Guide: Pinout, ledninger, kabeltyper og anvendelser
på 1970-01-01 79565
-
Den ultimative guide til trådfarvekoder i moderne elektriske systemer
Den måde, vores elektriske systemer bruger farver på, er ikke kun til udseende.Hver trådfarve angiver nu en bestemt funktion, hvilket gør det lettere at identificere og håndtere elektriske komponen...på 1970-01-01 66960
-

Purge Valve Guide: Funktion, symptomer, test og udskiftning for optimal motorydelse
Purge -ventilen er en vigtig del af en bils system, der hjælper med at holde luften ren ved at håndtere brændstofdampe, før de kan flygte ud i atmosfæren.Dette hjælper ikke kun miljøet ved at reduc...på 1970-01-01 63098
-
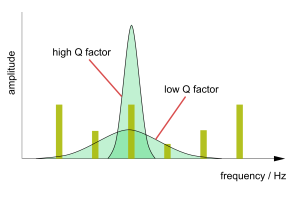
Kvalitet (q) Faktor: Ligninger og applikationer
Kvalitetsfaktoren eller 'Q' er vigtig, når man kontrollerer, hvor godt induktorer og resonatorer fungerer i elektroniske systemer, der bruger radiofrekvenser (RF).'Q' måler, hvor godt et kredsløb m...på 1970-01-01 63040
-

Opnå spidsydelse med den maksimale effektoverførselsteorem
Den maksimale effektoverførselssætning forklarer, hvordan energi fra en kilde, såsom et batteri eller generator, flyder til en tilsluttet belastning.Det viser den nøjagtige betingelse, hvor belastn...på 1970-01-01 54097
-
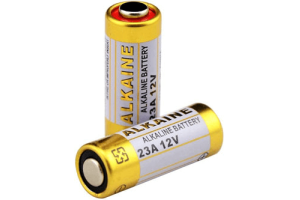
A23 batterispecifikationer og kompatibilitet
A23-batteriet er et lille, cylinderformet batteri med høj spænding.Også kaldet 23A, 23AE eller MN21 kører den på 12 volt og meget højere end AA- eller AAA -batterier.Dets specielle design ...på 1970-01-01 52184
Hot delnummer
-

ATSAM4S16BA-AU
Atmel
IC MCU 32BIT 1MB FLASH 64LQFP
TPS74650PQWDRBRQ1
Texas Instruments
IC POWER
HSMP-381F-TR1G
Broadcom Limited
RF DIODE PIN 100V SOT323
CAT5111LI-50-G
onsemi
IC POT DGTL 50K 100TAP 8DIP
LDL212PUR
STMicroelectronics
IC REG LINEAR POS ADJ 1.2A 6DFN
FDP80N06
onsemi
MOSFET N-CH 60V 80A TO220-3
MIC4451BM
Microchip Technology
IC GATE DRVR LOW-SIDE 8SOIC
UMK105CG680JVHF
Taiyo Yuden
CAP CER 68PF 50V C0G/NP0 0402
MCP4562T-503E/MF
Microchip Technology
IC DGT POT 50KOHM 257TAP 8DFN
PMV60ENEAR
Nexperia USA Inc.
MOSFET N-CH 40V 3A TO236AB
RFPIC12F675H-I/SS
Microchip Technology
IC MCU 1KX14 RF FSK/ASK 20SSOP
AD8554ARZ-REEL
Analog Devices Inc.
IC OPAMP ZERO-DRIFT 4CIRC 14SOIC
BRC2012T1R5MD
Taiyo Yuden
FIXED IND 1.5UH 1.1A 117MOHM SMD
VSC8641XKO-03
Microchip Technology
IC INTERFACE CONTROLLER
MX25L1633EM2I-10G
Macronix
IC FLASH 16MBIT SPI 104MHZ 8SOP
MCZ33290EFR2
NXP USA Inc.
IC INTERFACE SPECIALIZED 8SOIC
MAX500BEJE
Analog Devices Inc./Maxim Integrated
IC DAC 8BIT V-OUT 16CDIP
TFZVTR6.8B
Rohm Semiconductor
DIODE ZENER 6.8V 500MW TUMD2M -
06035A122JAT2A
KYOCERA AVX
CAP CER SMD
GRM0336S1E9R6CD01D
Murata Electronics
CAP CER 9.6PF 25V S2H 0201
MAX6316LUK46BX
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 1 CHANNEL SOT23-5
IDT49FCT3805AQ8
Renesas Electronics America Inc
IC CLK BUFFER 1:5 20QSOP
SPW07N60CFD
Infineon Technologies
N-CHANNEL POWER MOSFET
BC846B
Diotec Semiconductor
BJT SOT-23 65V 100MA
08055C123KAT2A
AVX Corporation
CAP CER 0.012UF 50V X7R 0805
5.0SMDJ33A
MDE Semiconductor Inc
TVS DIODE UP 33VRWM 53.3VC
LTC6412CUF#PBF
Analog Devices Inc.
IC VARIABLE GAIN 1 CIRCUIT 24QFN
PIC16F616-I/ST
Microchip Technology
IC MCU 8BIT 3.5KB FLASH 14TSSOP
0454005.MR
Littelfuse Inc.
FUSE BRD MNT 5A 125VAC/VDC 2SMD
XCS40XL-4PQ240C
AMD
IC FPGA 192 I/O 240QFP
SNJ54HC151J
Texas Instruments
8-LINE TO 1-LINE DATA SELECTORS/
REG101NA-5/250
Texas Instruments
IC REG LINEAR 5V 100MA SOT23-5
MT53E1G64D4SQ-046 WT:A
Micron Technology Inc.
IC DRAM 64GBIT 2.133GHZ WFBGA
MP2106DK-LF
Monolithic Power Systems Inc.
IC REG BUCK ADJ 800MA 10MSOP
293D226X9010C2TE3
Vishay Sprague
CAP TANT 22UF 10% 10V 2312
TC4429MJA
Microchip Technology
IC GATE DRVR LOW-SIDE 8CERDIP -

SD103AW-E3-18
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 40V SOD123
C8051F304-GM
Silicon Labs
IC MCU 8BIT 4KB FLASH 11QFN
LM2724M
Texas Instruments
IC GATE DRVR HALF-BRIDGE 8SOIC
XCZU27DR-1FFVE1156I
Xilinx
XCZU27DR-1FFVE1156I
LDS6107PYGI8
Renesas Electronics America Inc
IC SENSOR TCH PURETOUCH 28SSOP
PCA9535CD,112
NXP USA Inc.
IC XPNDR 400KHZ I2C SMBUS 24SO
BSC0902NSATMA1
Infineon Technologies
MOSFET N-CH 30V 24A/100A TDSON
NFM3DCC222R1H3L
Murata Electronics
CAP FEEDTHRU 2200PF 50V 1205
DG212BDY-T1-E3
Vishay Siliconix
IC SWITCH SPST-NOX4 85OHM 16SOIC
CL10A475KA8NQNC
Samsung Electro-Mechanics
CAP CER 4.7UF 25V X5R 0603
2SC4883A
Sanken Electric USA Inc.
TRANS NPN 180V 2A TO220F
MKV10Z16VLC7
NXP USA Inc.
IC MCU 32BIT 16KB FLASH 32LQFP
IS61LV12816L-10TLI-TR
ISSI, Integrated Silicon Solution Inc
IC SRAM 2MBIT PARALLEL 44TSOP II
UCC38502N
Texas Instruments
IC PFC CTR AV CURR 100KHZ 20DIP
DS1090U-16+T
Analog Devices Inc./Maxim Integrated
IC CLOCK GENERATOR 8UMAX
MAX17806ETI+T
Analog Devices Inc./Maxim Integrated
ADVANCED SMART BATTERY PACK CONT
IDT7208L35P
Renesas Electronics America Inc
IC FIFO 64KX9 35NS 28DIP
V300B5C150BG
Vicor Corporation
DC DC CONVERTER 5V 150W